随着视觉系统及其他机器人辅助仪器的日渐兴起,现在也越来越常机器人负担越来越多的繁复任务。这样的情况下,产生了机器人之间互相转移零件的需求,如此一来,机器人之间也必须能相互通讯,来维持高效率及快速的生产作业时间。优傲科技的机器人支援多种通讯协定,可用于几乎所有的网路类型,不论新旧。其中包括:MODBUS、ProfiNet、EtherNet/IP、TCP/IP 及 XMLRPC。
TCP/IP 及远端控制
较常搭配 UR 机器人使用的通讯方式之一便是简单地透过乙太网路进行 TCP/IP 通讯端连线。为何 TCP/IP 受欢迎呢?许多在所有 UR 上执行之现成远端控制伺服器,包括主要、次要、即时及 Dashboard 伺服器,均使用 TCP/IP 通讯协定。这些伺服器接受来自远端用户端程式的各种指令,而用户端程式可能在外部装置或另一部机器人上执行。在机器人彼此交接零件的情境中,时间点可能会因为前一个任务而有所差异,因此就可使用 Dashboard 伺服器来指挥机器人启动、暂停或停止。若要瞭解 Dashboard 伺服器如何实际运作,请看这两部运作中的 UR3 协作型机器人如何解开魔术方块:
每部机器人可移动方块的三边,但其中有些动作需要另一部机器人用不同的方法夹持方块,让第一部机器人得以实际旋转其中一边。若要达成此目标,夹持住方块的机器人会移动到另一位置,并在移动完成时,告知要转动方块的机器人。然后,夹持住方块的机器人就会暂停其程式,直到转动方块的机器人通知方块的该侧已转动完成为止。
Dashboard 伺服器的功能远远不只是启动/停下机器人而已。若要瞭解 Dashboard 伺服器指令及用法的更多资讯,请浏览优傲科技技术支援页面的 Article 15690 。
替代远端控制伺服器
Dashboard 伺服器可供存取极高阶的功能,例如载入程式、取得机器人状态或开关机器人。而移动机器人等更特定的功能,则存在于机器人上执行的主要 (30001 连接埠)、次要 (30002 连接埠) 或即时 (30003 连接埠) 伺服器。这些伺服器会等候 URScript 指令,例如:
- movej(姿态) 将机器人移动成特定姿态
- sleep(秒数) 让机器人等候指定秒数
- (freedrive_mode) 让机器人进入 free drive 模式
这些指令将以编码字串的形式传送到机器人立即执行。这在两部机器人之间交接点不固定的情况下可派上用场:持有零件的机器人可告知另一部机器人移动到要交接零件的特定位置,或告知机器人在原地等候一段指定的时间。若要瞭解更多关于 URScript 的资讯及其原生功能,请下载 URScript 手册 (SW3.5)。此功能可远端操作 UR 机器人,而这些伺服器的统称也因此而来:远端控制伺服器。若有部分特定功能未受 URScript 原生支援,则可编写预先定义的功能,并将其加入机器人的前置程式码中,这样一来,当透过远端伺服器传送这些指令时,机器人就可瞭解其意义。
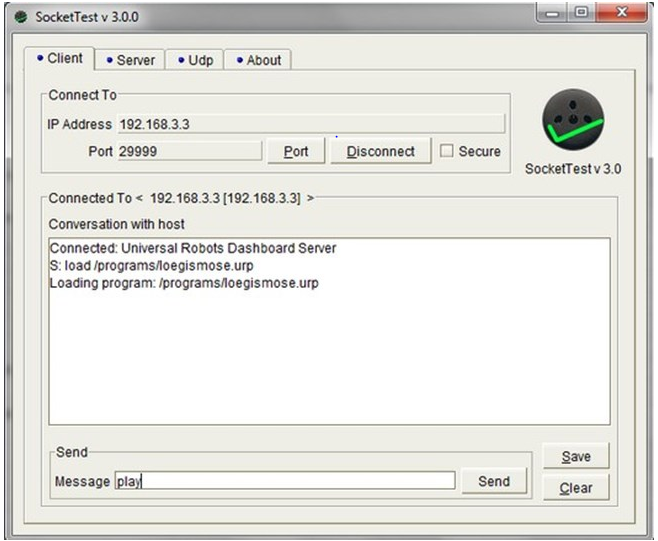
测试 Dashboard 伺服器:若要进行测试,可使用测试通讯端的程式,例如 HyperTerminal 或类似程式。在此范例中,使用了免费的 SocketTest程式
适用 XMLRPC 的时机
另一个值得一提的通讯方式是 XMLRPC,这个缩写代表 XML 格式的远端程序呼叫 (Remote Procedure Call)。机器人之间的通讯不一定需要这个通讯方式,但是若要在执行阶段中执行 URScript 无法支援的功能时,就会非常有用。XMLRPC 可在执行阶段中呼叫以另一种程式语言所编写的程式,或预先定义的功能。若有 URController 不相容的动作须另外执行,XMLRPC 就非常实用。若要进一步瞭解 XMLRPC 功能,请参考优傲科技技术支援网页上的 Article 16326。

在美国印第安那州的 Task Force Tips,两部 UR5 机器人联手作业,构成视觉控制的机台操作应用情境。视觉系统和机器人间的所有通讯都透过MODBUS 进行。
下载 MODBUS 电子书
MODBUS 通讯协定为业界标准,在机器人产业里经常使用。虽然 MODBUS 通常和 MODBUS 控制器一起使用,但该通讯协定仍可独立运作,成为机器人间相互沟通的另一种方式。UR 经销商 Axis New England 提供了一本阅读方便的电子书,说明如何设定 MODBUS 连线,以及设定机器人间通讯所需的相关指引。该电子书亦介绍了使用 MODBUS 暂存器在两部机器人之间传送座标资讯的范例程式,并有范例程式的下载连结及程式实际执行中所录制的影片。


